+



24V-48V DC bürstenlosen motor fahrer ZM-6510A controller 10A, anwendbar zu DC bürstenlosen motor mit Halle motor unter 300W
24V-48V DC bürstenlosen motor fahrer ZM-6510A controller 10A, anwendbar zu DC bürstenlosen motor mit Halle motor unter 300W
Hauptmerkmale
◆ Hohe drehmoment und hohe geschwindigkeit ausgang, mit die maximale geschwindigkeit bis zu 10000/min (je nach motor geschwindigkeit);
◆ Mit puls geschwindigkeit ausgang, die motor geschwindigkeit beobachtet werden zu jeder zeit;
◆ Geschwindigkeit regulierung modus: 0-5V analog menge und 10Hz - 300Hz PWM geschwindigkeit regulierung, bequem für benutzer;
◆ Start stop ermöglichen die steuerung signal und richtung signal eingang;
◆ Funktionen wie überstrom, überspannung, unterspannung, gesperrt rotor, etc.
Produkt Übersicht
ZM-6510A DC bürstenlosen motor fahrer ist die neueste produkt lanciert durch unsere unternehmen. Dieses produkt nutzt große-skala integrierte schaltung zu ersetzen die original hardware-design, mit höhere anti-störungen und schnelle reaktion leistung. Dieses produkt ist geeignet für fahren jede low-spannung drei-phase DC bürstenlosen motor mit Halle oder ohne halle sensor deren spitzenstrom ist unten 5A und netzteil spannung ist innerhalb DC18V ~ 50V (panel nenn DC24V ~ 48V). Die produkte sind verwendet in eine serie von elektrische automatisierung steuerung bereichen wie stricken ausrüstung, medizinische geräte, lebensmittel verpackung maschinen, elektrische werkzeuge, etc.
Funktion Übersicht
Die standard fabrik standard einstellung ist die open loop modus von platz welle mit Halle/ohne Halle. Verschiedene programme kann geschrieben werden nach die bedürfnisse der verschiedenen kunden zu erreichen mehrere betriebsarten wie die high-speed-regelung von platz welle mit Halle geschwindigkeit und die regelung von platz welle ohne Halle geschwindigkeit.
Elektrische leistung (bei umgebungs temperatur Tj = 25 ℃)
Netzteil DC18V ~ 50V DC netzteil, kapazität ist nach ausgewählt zu motor power
Ausgang strom peak 5,0 EIN
Maximale nennleistung 240W
Anpassung motor Anpassung motor mit ausgang power ≤ 180W
Isolierung widerstand> 500M Ω bei raum temperatur
Die isolierung festigkeit ist 0,5 KV unter normalen temperatur und druck für 1 minute
Verwenden umwelt parameter:
Kühl modus: natürliche luftkühlung (gezwungen luftkühlung ist empfohlen)
Versuchen zu vermeiden, staub, öl nebel und korrosiven gas in die umwelt
Temperatur 0 ℃ ~ + 50 ℃
Feuchtigkeit <80% RH, keine kondensation, kein frost
Vibration 5,9 m/s2 Max
Lagerung temperatur: - 20 ℃ ~ + 65 ℃
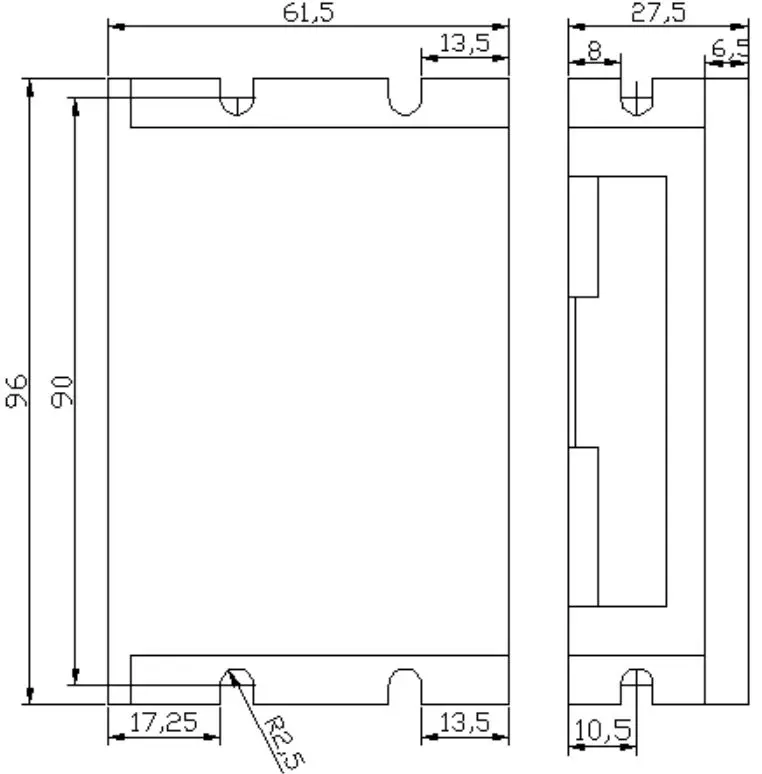
Insgesamt dimension 96 × sechzig-einen punkt fünf × 27,5mm
Gewicht: über 0,15Kg
Anzeige licht POWER grün power anzeige licht, power auf zeigt an, dass die power versorgung normal ist
ALARM rot status anzeige
(1) das rote licht ist unter normalen bedingungen;
(2) das rote licht ist immer auf, wenn EN ist nicht verbunden zu GND1;
(3) In fall von motor Halle fehler, das rote licht blinkt 1 und stoppt für 1s;
(4) unter spannung (netzteil spannung <15V), das rote licht blinkt 2 und stoppt für 1s;
(5) In fall von überspannung (netzteil spannung> 56V), das rote licht blinkt für 3 mal und stoppt für 1s;
(6) rote licht blinkt 4 und stoppt für 1s in fall von überstrom (stick betriebs strom> 6A);
(7) wenn der motor ist gesperrt, das rote licht blinkt für 5 sekunden und stoppt für 1 sekunde;
(8), wenn die fahrer überlastet ist, das rote licht blinkt für 6 sekunden und stoppt für 1 sekunde.
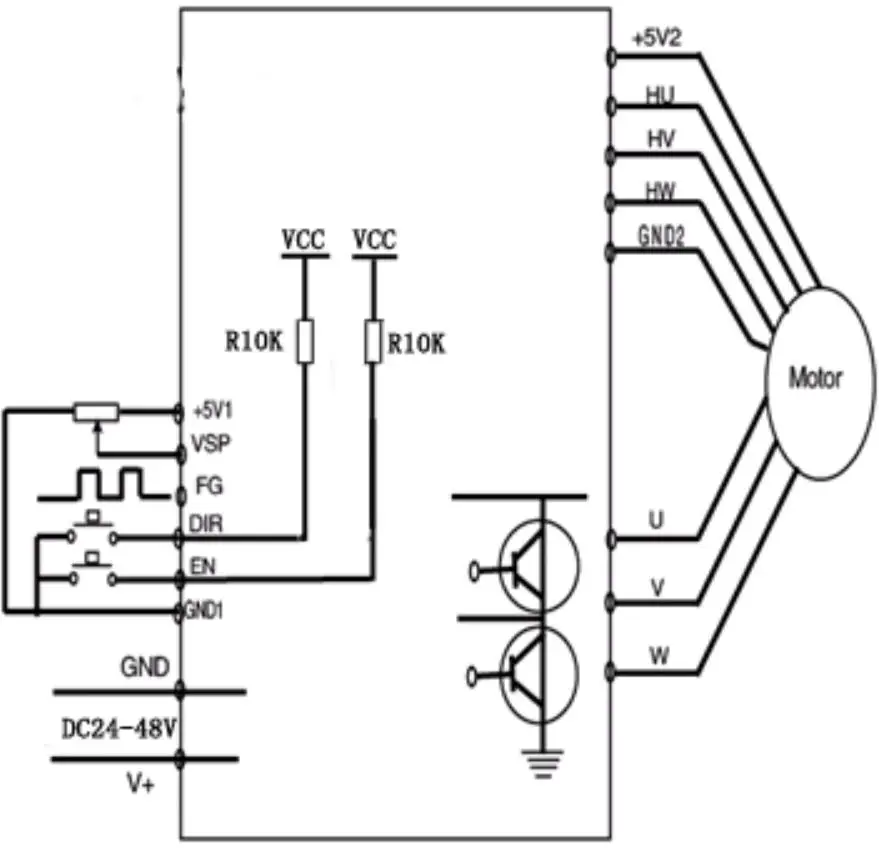
Control signal terminal + 5V1 control signal power liefern positive (gebaut-in power ausgang)
VSP externe speed control signal, zu realisieren, 0 ~ 100% motor geschwindigkeit regulierung durch externe potentiometer
FG motor geschwindigkeit impuls ausgang können umgewandelt werden in tatsächliche motor geschwindigkeit durch messung der frequenz von dieses signal
DIR high und low level control motor vorwärts und rückwärts, verbinden GND1 motor reverse, verbinden GND1 oder + 5V1 motor vorwärts. Wenn schalt vorwärts-und rückwärts, in zu reduzieren auswirkungen, es ist besser zu set EN hohe erste um den motor zu stoppen.
EN motor ermöglichen die steuerung, EN verbunden zu GND1, motor läuft (online status), EN nicht verbunden oder hohe niveau, motor nicht läuft (offline status, diese status rot licht ist immer auf)
GND1 control signal netzteil boden
Halle signal terminal + 5V2 motor Halle netzteil positive
HU Halle sensor signal U phase eingang
HV Halle sensor signal V phase eingang
HW Halle sensor signal W phase eingang
Halle netzteil boden von GND2 motor
Drei phase ausgang signal von motor und netzteil terminal U, V, W motor, verbunden zu motor wicklung
GND, V + DC 18V ~ 50V netzteil eingang. (Panel nenn DC24V ~ 48V)
Funktion beschreibung
Geschwindigkeit regulierung modus auswahl (VSP/PWM) 1. externe eingang geschwindigkeit regulierung: verbinden die zwei festen enden der externe potentiometer (5K ~ 10K) zu die GND1 und + 5V1 enden der fahrer bzw., und verbinden die regulierung ende zu die VSP ende. Sie verwenden können die externe potentiometer zu geschwindigkeit regulierung. Sie können auch eingang analog spannung zu die VSP ende durch andere control einheiten (wie PLC, SCM, etc.) zu erreichen geschwindigkeit verordnung (relative zu GND1). Die akzeptanz bereich der VSP port ist DC 0V ~ + 5V, und die entsprechenden motor geschwindigkeit ist 0 ~ bewertet geschwindigkeit;
2. PWM geschwindigkeit regulierung: verbinden die PWM positive terminal zu VSP und die negative terminal zu GND1. Die eingang frequenz kann 10Hz-300Hz und die duty zyklus kann geändert werden für geschwindigkeit regulierung
Geschwindigkeit messung signal ausgang (FG)
Die fahrer bietet die motor geschwindigkeit messung puls signal, die proportional zu dem motor geschwindigkeit. Die puls ausgang modus ist die open schaltung ausgang von 4,7 K sammler von pull-up widerstand.
Geschwindigkeit berechnung methode: motor geschwindigkeit (RPM)= F ÷ N × sechzig
F = frequenz auf FG pin tatsächlich gemessen mit frequenz meter
N = anzahl der motor pole (2-pol motor N = 2; 4-pole motor N = 4)
Zum beispiel, wenn die benutzer wählt eine 4-pol motor, dann, wenn der ausgang FG signal ist 200Hz, die motor geschwindigkeit = 200 ÷ 4 × 60 = 3000 rpm.
Motor vorwärts/rückwärts signal
(DIR) die vorwärts und rückwärts drehung der motor kann gesteuert werden durch die umwandlung von hohen und niedrigen ebenen von die control terminal DIR.
Hinweis: In auftrag zu vermeiden plötzlichen umkehr, wenn die motor ist läuft mit hoher geschwindigkeit, haben wird eine riesige auswirkungen auf die motor und mechanische ausrüstung, wenn die DIR terminal erhält die umkehr signal, die fahrer erste verlangsamt die motor, bis es stoppt. Nach stoppen für über 1s, die motor ändert seine richtung der drehung und geschwindigkeiten bis zu die set geschwindigkeit.
Die motor start/stop signal (EN) können die stop und betrieb der motor durch die umwandlung von hohen und niedrigen ebenen der steuerung terminal EN. Wenn EN ist niedrig, die motor arbeitet normalerweise; Wenn EN ist hohe oder nicht verbunden, der motor stoppt arbeits und ist in freies zustand, und das rote licht ist immer auf. In dieser zeit, die stick power verbrauch ist ≤ 20mA.
Die fabrik einstellung ist EN und GND1 kurzgeschlossen.
Verdrahtung diagramm
Insgesamt dimension: (einheit: mm)
Bewegungsart : DC Motor
Ursprung : CN (Herkunft)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}